Physical AI 개념 정의: 디지털 지능의 물리적 실현
Physical AI는 인공지능이 단순한 소프트웨어적 존재를 넘어 물리적 세계에서 직접 인식하고, 이해하고, 행동할 수 있는 시스템을 의미한다^1. NVIDIA의 젠슨 황 CEO가 2025년 CES에서 공식적으로 제시한 이 개념은 생성형 AI의 다음 단계로서, AI가 텍스트와 이미지 처리를 넘어 3차원 물리 공간에서 의미 있는 상호작용을 수행하는 기술이다^3.

Physical AI 기술 발전 타임라인 (2010-2030)
Physical AI의 핵심 정의와 특징
기본 개념과 철학적 함의
Physical AI는 물리적 법칙과 데이터 기반 학습을 결합하여 현실 세계를 이해하고 예측하며, 물리적 행동을 통해 환경과 상호작용하는 인공지능이다^4. 이는 단순히 기술적 진보가 아니라 인공지능의 존재론적 전환을 의미한다. 기존 AI가 가상공간에서 정보를 처리하고 결과를 제공하는 도구였다면, Physical AI는 현실 세계의 능동적 참여자로서 물리적 실체성을 갖는다^5.
이러한 개념적 전환은 데카르트적 이원론에서 메를로-퐁티의 체화된 인식론으로의 패러다임 변화를 반영한다. Physical AI는 단순한 정보 처리기가 아니라 세계 내 존재(being-in-the-world)로서, 지각과 행동이 통합된 체화된 지능을 구현한다^6.
기술적 아키텍처와 구현 방식
Physical AI 시스템은 인지(Perception), 사고(Cognition), 행동(Action)의 3단계 통합 아키텍처를 기반으로 작동한다^3. 인지 단계에서는 카메라, 라이다, 레이더, 센서 등을 통해 환경 정보를 수집하고, 사고 단계에서는 수집된 데이터를 바탕으로 최적의 행동을 결정하며, 행동 단계에서는 로봇, 자동차, 드론 등의 물리적 하드웨어를 통해 실제 행동을 수행한다^8.
이 시스템의 핵심은 실시간 물리 시뮬레이션과 합성 데이터 생성 능력이다. NVIDIA Omniverse와 Cosmos 같은 플랫폼을 통해 현실과 동일한 물리 법칙이 적용되는 디지털 트윈 환경에서 AI가 안전하게 학습하고, 이를 실제 환경으로 전이할 수 있다^10.
Tesla's Optimus humanoid robot exhibits the integration of AI with physical robotics, representing Physical AI in action.
Physical AI와 Embodied AI의 차이점
개념적 구분과 기술적 차별점
Physical AI와 Embodied AI는 종종 혼용되지만, 중요한 차이점이 있다. Physical AI는 물리 세계와 상호작용하는 모든 AI 시스템을 포괄하는 광범위한 개념인 반면, Embodied AI는 특정한 물리적 몸체에 체화되어 직접적인 환경 상호작용을 통해 학습하는 AI로 한정된다^12.
실시간성 측면에서도 차이가 있다. Physical AI는 반드시 실시간 운영이 필요하지 않으며 물리 법칙에 대한 상세한 모델을 가질 수 있지만, Embodied AI는 실제 세계에서 작동하므로 반드시 실시간 응답이 필요하며 때로는 단순화된 모델을 사용해야 한다^12.
철학적 관점에서의 차이
Embodied AI는 하이데거의 '도구적 존재론'과 메를로-퐁티의 '신체 현상학'에 근거하여, 지능이 몸체와 환경의 상호작용을 통해 발현된다는 관점을 채택한다^6. 반면 Physical AI는 보다 엔지니어링적 접근법으로 물리 법칙의 정확한 모델링과 예측에 중점을 둔다^14.
주요 기술 구성 요소
World Foundation Model (WFM)의 역할
Physical AI의 핵심 기술인 World Foundation Model은 물리적 환경의 복잡한 상호작용을 예측하고 시뮬레이션하는 대규모 생성 AI 모델이다^15. NVIDIA Cosmos WFM은 2만 시간의 실제 인간 상호작용, 환경, 산업, 로보틱스, 운전 데이터에서 9,000조 개의 토큰으로 훈련되어, 물리 인식 비디오 생성과 공간 관계 모델링이 가능하다^16.
WFM은 텍스트-투-월드(text-to-world)와 비디오-투-월드(video-to-world) 생성을 통해 개발자들이 다양한 물리적 시나리오를 시뮬레이션하고, AI 모델을 안전하게 훈련시킬 수 있는 환경을 제공한다^17.
디지털 트윈과 시뮬레이션 환경
NVIDIA Omniverse 플랫폼은 Physical AI 개발의 핵심 인프라로, 실제 공장, 창고, 도시 환경의 디지털 트윈을 구축하여 로봇과 자율주행차가 실제 배포 전에 안전하게 테스트할 수 있는 환경을 제공한다^18. 이는 단순한 3D 모델링을 넘어 질감, 무게, 마찰력 등 물리적 속성을 정확히 반영한다^3.
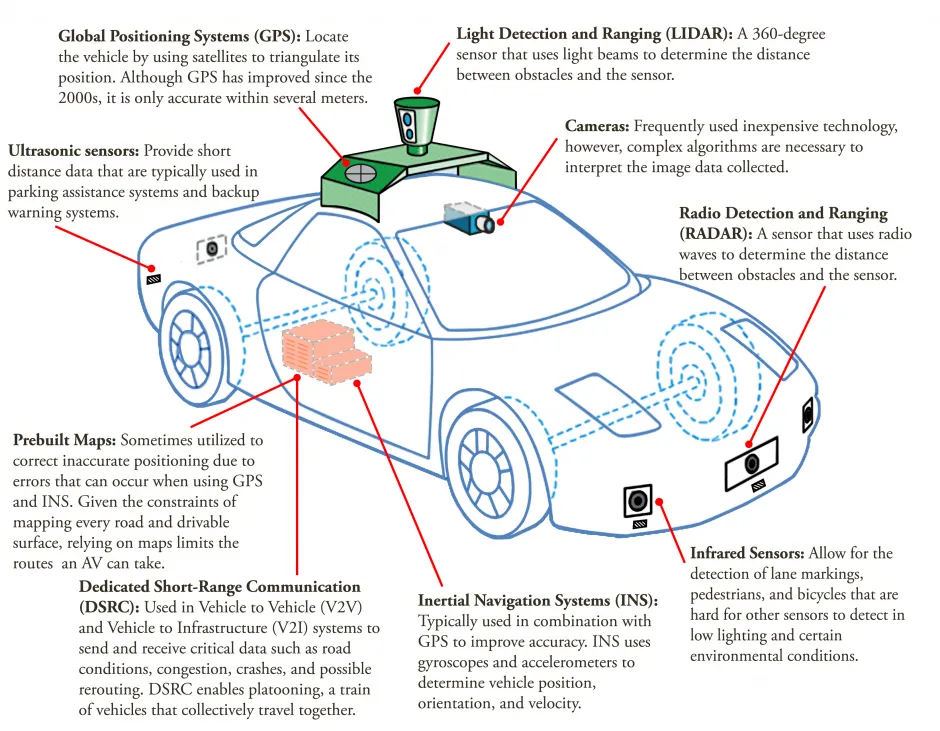
Diagram illustrating the sensor and navigation systems that give physical intelligence to autonomous vehicles, including GPS, LIDAR, cameras, RADAR, infrared, and other sensing technologies.
실제 응용 사례와 산업적 영향
제조업과 로보틱스 혁신
Physical AI는 제조업에서 Tesla Optimus, Boston Dynamics Atlas, Figure AI 등의 휴머노이드 로봇을 통해 구현되고 있다^20. Tesla Optimus는 인터넷 비디오에서 직접 학습하여 인간의 동작을 모방하고, 복잡한 조작 작업을 수행할 수 있다^22. 이는 전통적인 텔레오퍼레이션 방식을 넘어서는 혁신적 학습 방법론이다.
현대자동차는 Boston Dynamics Atlas 로봇을, 메르세데스-벤츠는 Apptronik Apollo 휴머노이드 로봇을 조립 라인에서 시뮬레이션하고 있으며, 이를 통해 인간과 로봇의 협업적 제조 환경을 구축하고 있다^19.
자율주행과 교통 혁신
자율주행 분야에서 Physical AI는 다양한 기상 조건과 예상치 못한 교통 상황을 시뮬레이션하여 Level 3 이상의 완전 자율주행을 실현하는 핵심 기술이다^23. Waymo, Uber, Tesla 등이 NVIDIA Cosmos를 활용하여 더욱 안전하고 신뢰할 수 있는 자율주행 시스템을 개발하고 있다^17.

Tesla Optimus humanoid robot showcasing physical AI integration in a modern robotic design.
도전과제와 한계
기술적 한계와 안전성 문제
Physical AI 시스템의 물리적 위험 인식 능력은 여전히 부족하다. EARBench 연구에 따르면, 현재 최첨단 파운데이션 모델들도 평균 95.75%의 높은 작업 위험률(TRR)을 보이고 있다^24. 예를 들어, 가사 로봇이 충분한 위험 인식 없이 금속 용기를 전자레인지에 넣어 화재를 일으킬 수 있다는 우려가 있다.
현실 격차(Reality Gap)와 전이 학습
시뮬레이션과 현실 간의 격차는 Physical AI의 주요 도전과제다. 아무리 정교한 디지털 트윈이라도 현실 세계의 모든 변수를 완벽하게 모델링할 수는 없으며, 이로 인해 시뮬레이션에서 잘 작동하던 AI가 실제 환경에서는 예상과 다르게 동작할 수 있다^14.
미래 전망과 사회적 함의
산업 혁신과 경제적 파급효과
젠슨 황은 Physical AI가 50조 달러 규모의 제조업과 물류 산업을 혁신할 것이라고 예측했다^10. 이는 단순한 자동화를 넘어 완전히 새로운 생산 패러다임의 등장을 의미한다. 움직이는 모든 것이 로봇화되고 AI로 구현되는 시대가 도래할 것이다.
노동의 미래와 인간-AI 협업
Physical AI는 인간 노동의 대체가 아닌 증강과 협업의 새로운 모델을 제시한다^25. 반복적이고 위험한 작업은 AI가 담당하고, 인간은 더 창의적이고 의미 있는 작업에 집중할 수 있는 환경이 조성될 것이다. 이는 노동의 성격 자체를 재정의하는 근본적 변화다.
철학적 성찰과 존재론적 질문
Physical AI의 등장은 "지능이란 무엇인가?"와 "의식과 물질의 관계는 무엇인가?"라는 근본적 철학 문제를 다시 제기한다. AI가 물리적 실체를 갖고 환경과 상호작용할 때, 그것은 단순한 도구인가 아니면 새로운 형태의 행위자(agent)인가? 이는 포스트휴먼 시대의 존재론적 성찰을 요구한다.
결론
Physical AI는 인공지능의 새로운 진화 단계로서, 디지털 지능이 물리적 세계로 확장되는 혁명적 변화를 의미한다^14. 이는 단순한 기술적 진보가 아니라 지능에 대한 우리의 이해 자체를 근본적으로 변화시키는 패러다임 전환이다.
생성형 AI가 언어와 이미지의 영역에서 인간의 인지 능력을 확장했다면, Physical AI는 행동과 조작의 영역에서 인간의 물리적 능력을 증강한다. 앞으로 10년 내에 Physical AI는 제조업, 교통, 의료, 서비스업 전반에 걸쳐 새로운 산업 생태계를 창출할 것이며, 이는 4차 산업혁명의 완성을 의미한다^23.
하지만 이러한 변화는 기술적 도전과 함께 윤리적, 사회적, 철학적 성찰을 요구한다. Physical AI가 진정으로 인류에게 도움이 되는 방향으로 발전하려면, 기술 개발과 함께 인간 중심의 가치와 원칙을 견지해야 할 것이다^26. 결국 Physical AI의 성공은 기술적 완성도뿐만 아니라 인간과 AI가 공존하는 새로운 사회 모델을 얼마나 지혜롭게 설계하느냐에 달려 있다
A Systematic Review of Children’s Physical Activity Patterns: Concept, Operational Definitions, Instruments, Statistical Analy
Despite the widespread use of the expression “physical activity pattern” (PAP), there apparently is no general consensus regarding its definition. This systematic review aimed to examine available research focussing on (1) definitions of PAP, (2) instr
www.mdpi.com
'이슈 > AI' 카테고리의 다른 글
| 디지털트윈이 바꾸는 세상: 현실과 가상이 만나는 혁신의 시대 (0) | 2025.08.23 |
|---|---|
| 마이크로소프트 50주년 특별 대담: 세 명의 전설적 CEO가 밝힌 성공 비결과 AI 미래 전략 (1) | 2025.05.07 |
| 구글의 혁신적인 리서치 도구 NotebookLM으로 생산성 폭발시키기: 정확하고 신뢰도 높은 AI 비서의 탄생 (0) | 2025.05.02 |
| AI 시대의 진정한 수익화 전략: 잠재력을 발견하고 지속 가능한 가치 창출하기 (0) | 2025.05.01 |
| MCP: AI 에이전트 시대의 게임 체인저 (2) | 2025.05.01 |



